>>协会七届三次理事会议暨第四次常务理事会议在德清召开
>>[朝闻天下]北斗规模应用进入发展关键阶段
>>[共同关注]“身边的北斗”如何改变我们的生活
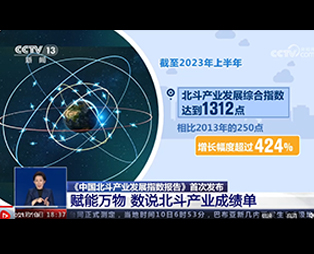
>>[朝闻天下]《中国北斗产业发展指数报告》首次发布
>>第一届中国测绘地理信息大会圆满落幕
>>beplay安装包
>>关于举办第一届中国测绘地理信息大会的通知(第三号)
>>beplay888备用网址
>>beplay安全
>>2023年度卫星导航定位科学技术奖评审结果公示
>>于贤成会长出席智能汽车软件大会并为武汉智能汽车软件园
>>“北斗赋能传统产业数字化转型发展” 太阳岛科技论坛成功
>>2023北斗优先中国行启动仪式暨雄安站高端论坛成功举办
>>北斗乐跑•科普中国——雄安智慧跑活动成功举办
>>国际时空信息综合服务专委会:召开2023年度工作会议
>>自然资源报:北斗规模化应用开启新篇章
>>中国日报:卫星导航与位置服务产业区域聚集优势明显
>>新华社:2022年国内智能手机出货量达2.64亿部 其中2.6亿部
>>协会发布《2023中国卫星导航与位置服务产业发展白皮书》
>>[新闻直播间] 北斗系统在大众消费领域大规模应用
徐冠华
孙家栋










 会员综合服务平台
会员综合服务平台

![[朝闻天下]北斗规模应用进入发展](http://www.88cc8.com/uploadfile/2023/1114/20231114120538534.jpg)
![[朝闻天下]《中国北斗产业发展指](http://www.88cc8.com/uploadfile/2023/1113/20231113120813292.jpg)





